Alex
Robotics
Research
Resources
Students
About
GRO860
|
GMC714
Research Projects
Portfolio of research projects from actuators design to software development
Active
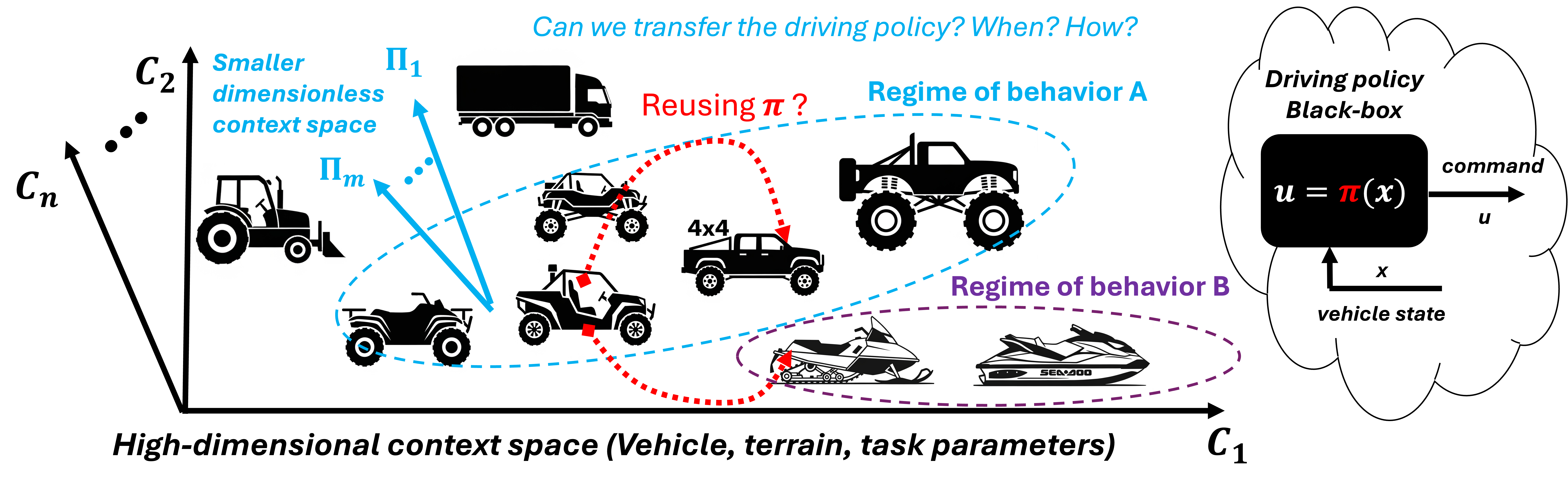
Generalizing Robotic Control
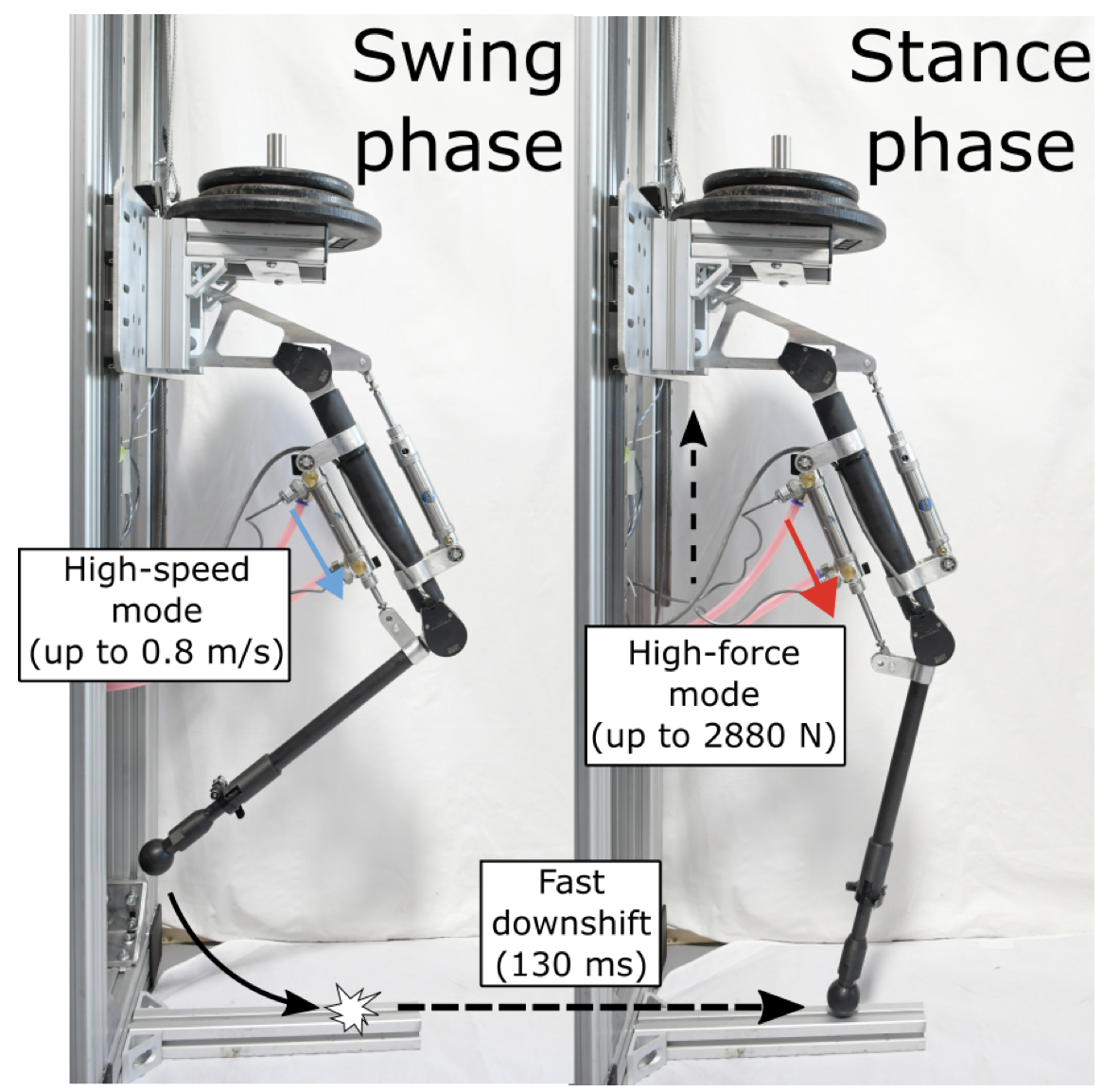
Efficient Walking Robot
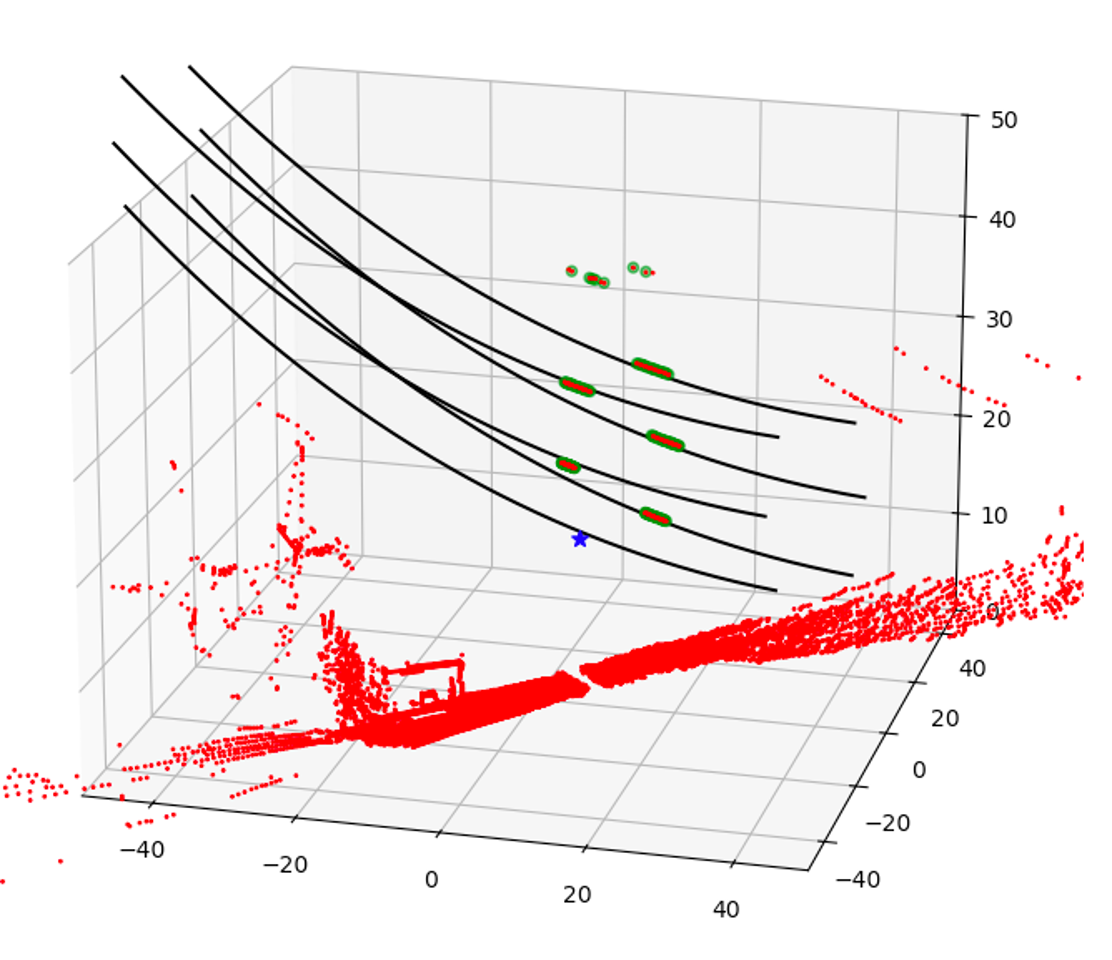
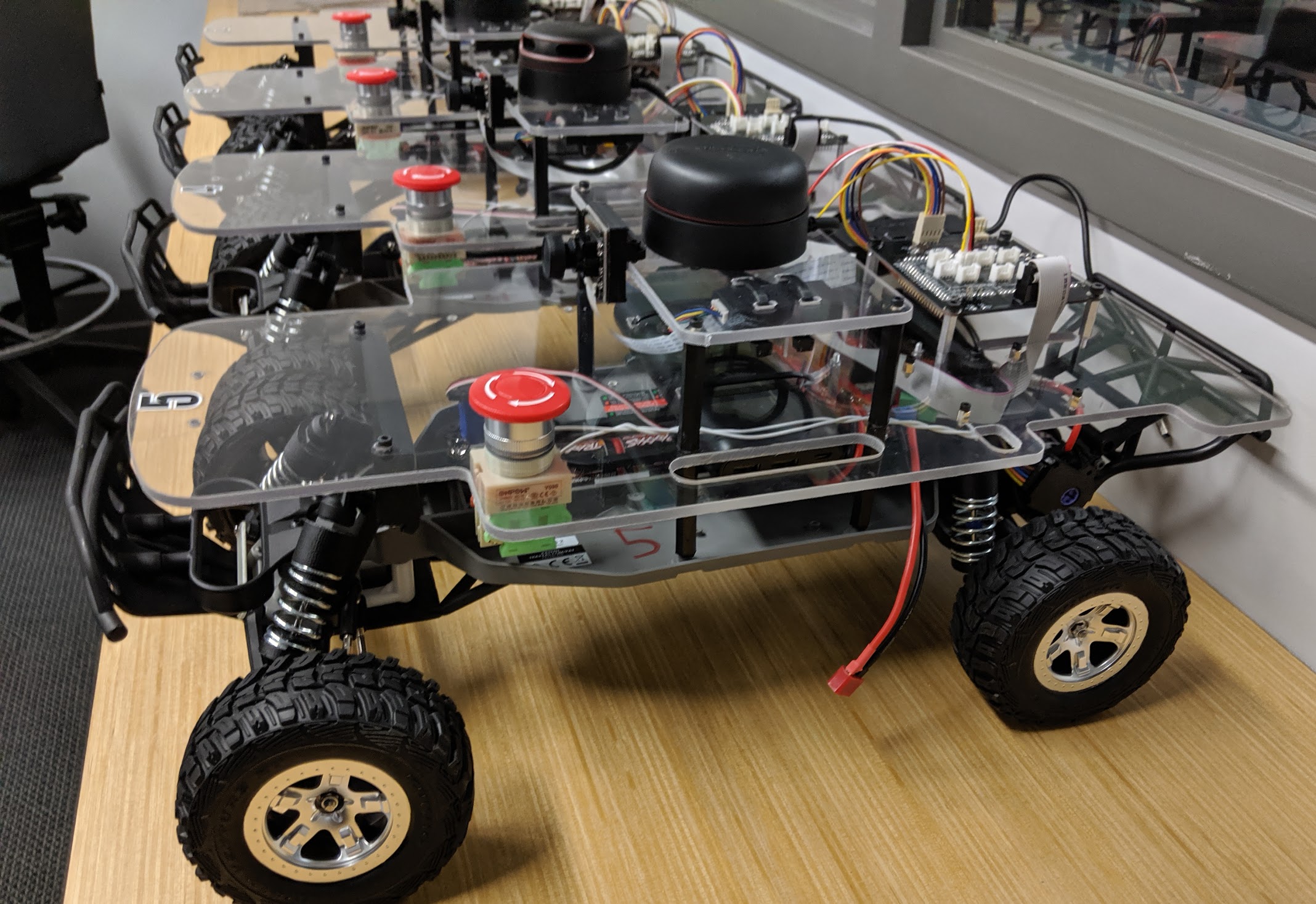
Off-Road Autonomous Driving
UdeS (2017-now)
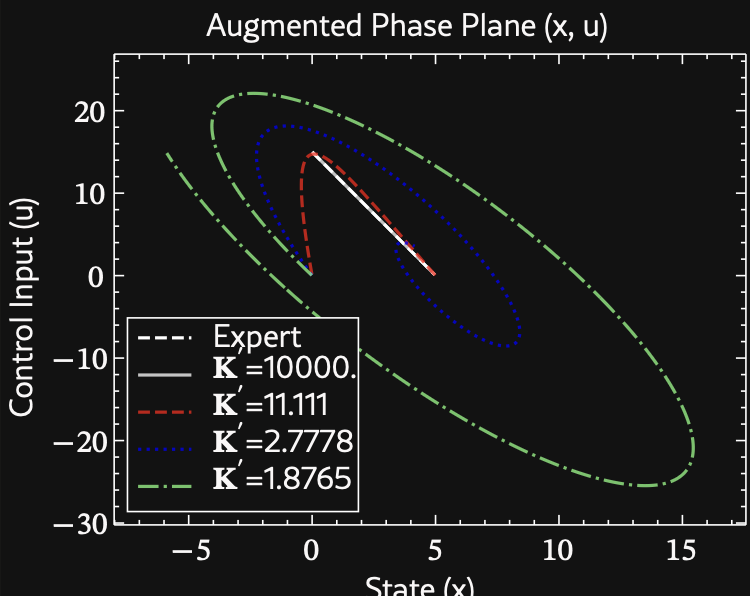
Closed-Loop Stability for Diffusion Policies
UAV Power Line Inspection
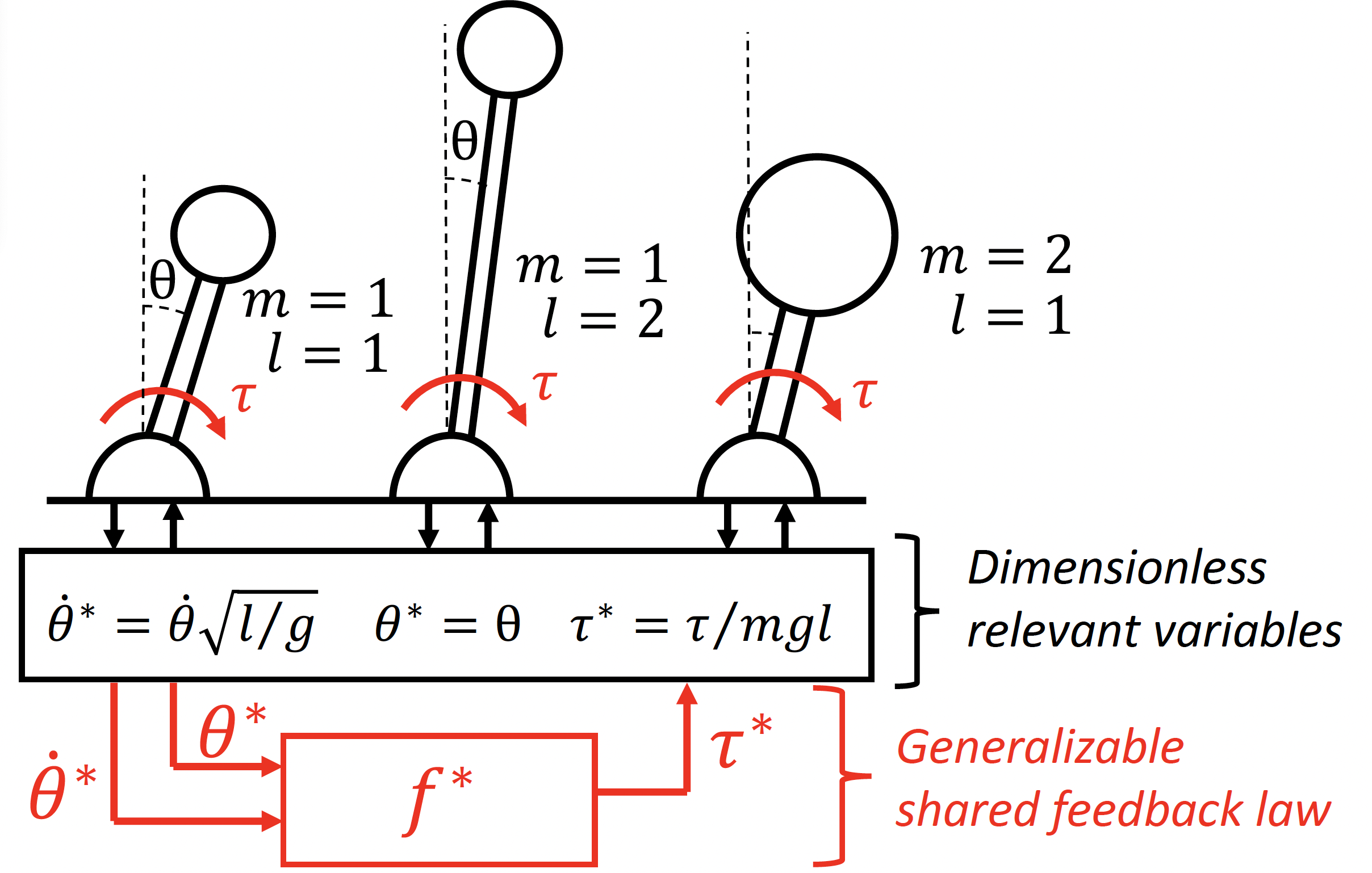
Dimensionless Control Policies
Low-Adhesion Vehicle Control
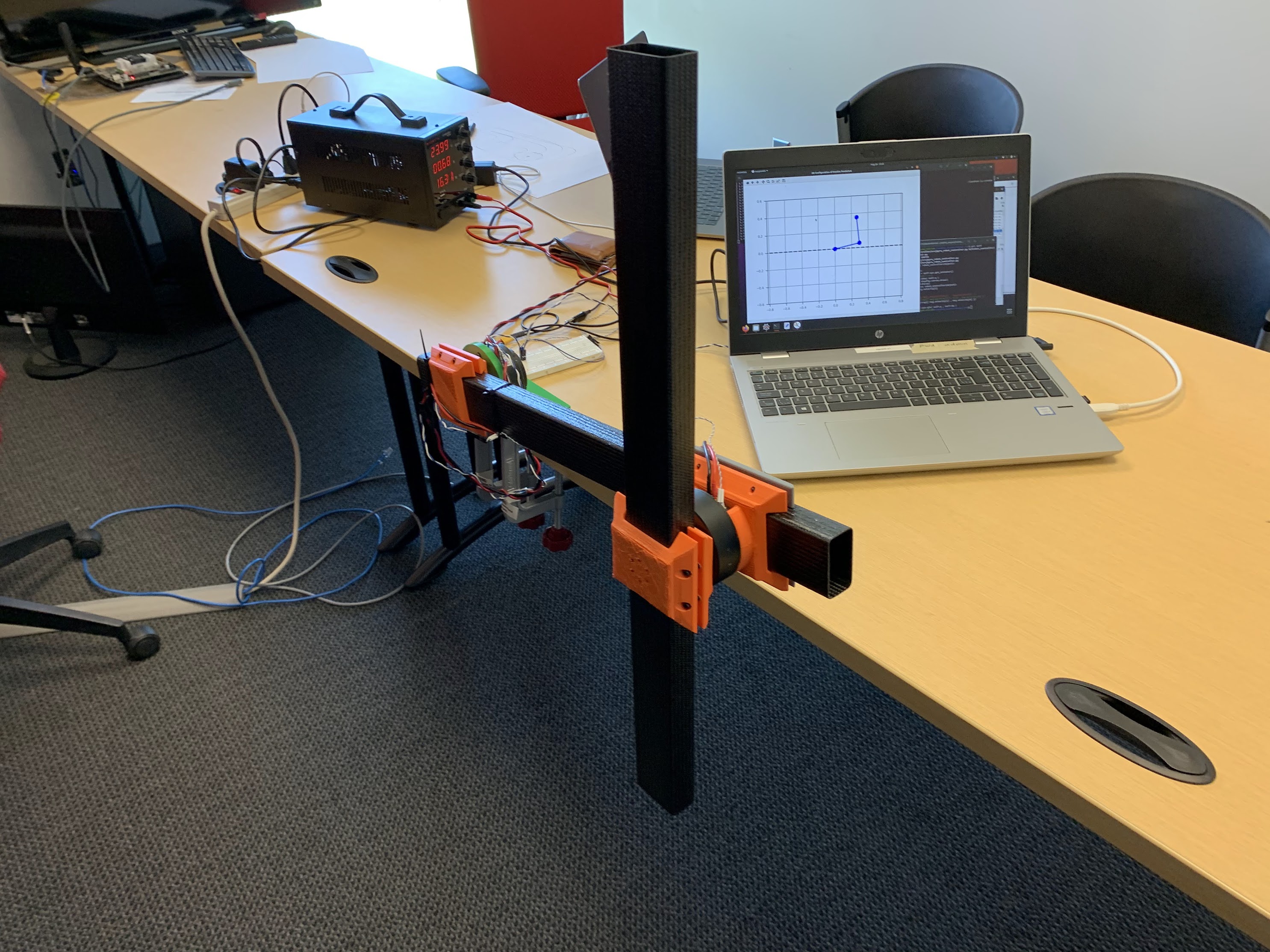
Low-Cost 2DoF Robotic Arm
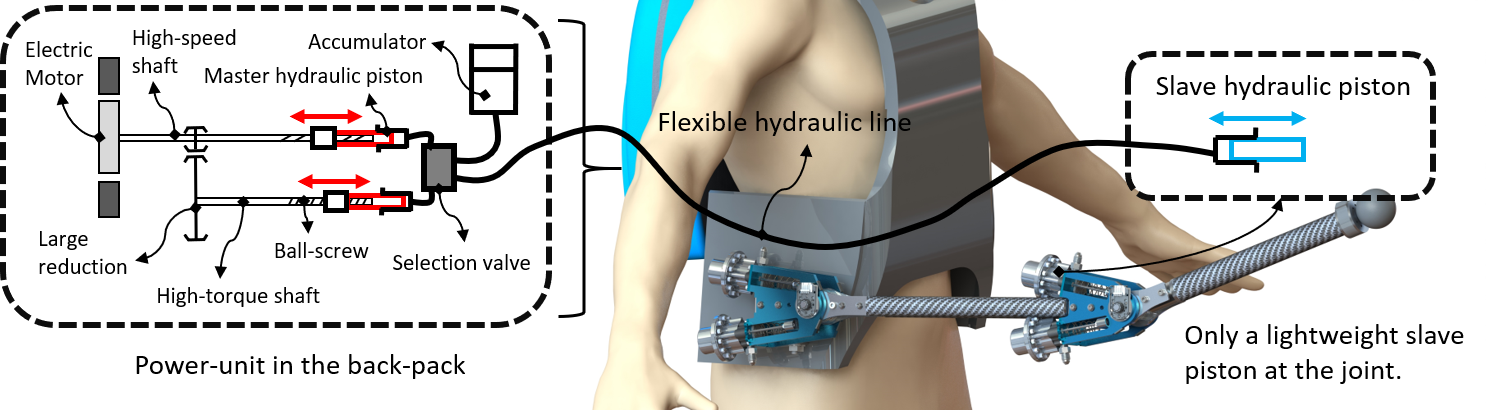
Multi-modal & Reconfigurable Hydrostatics
Smart Motorized Assistance for Floor Lifts
Collaborative Patient Transfer 2 DOF Robot
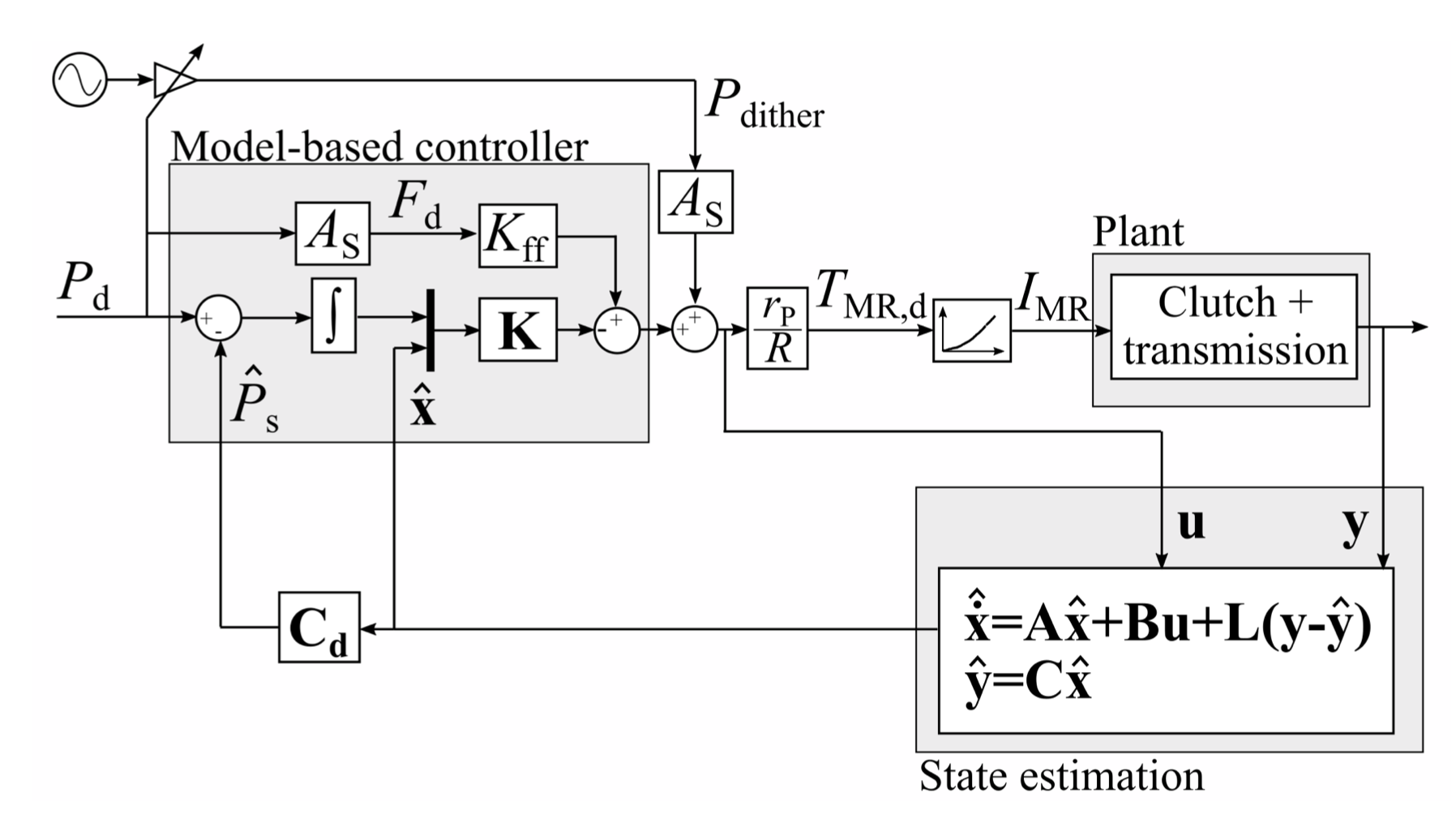
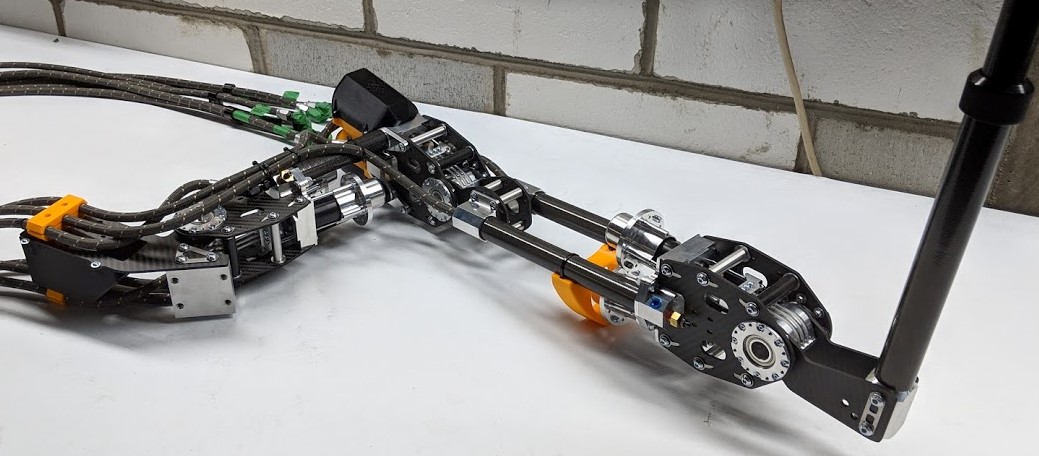
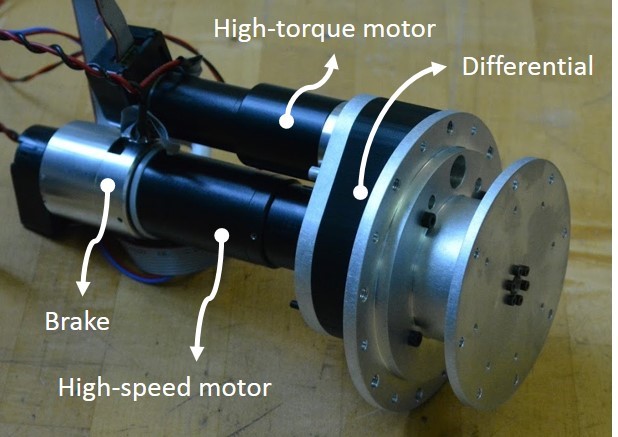
Dual-speed Actuators for Collaborative Ceiling Robots
Automatic landing controllers for inspection drones
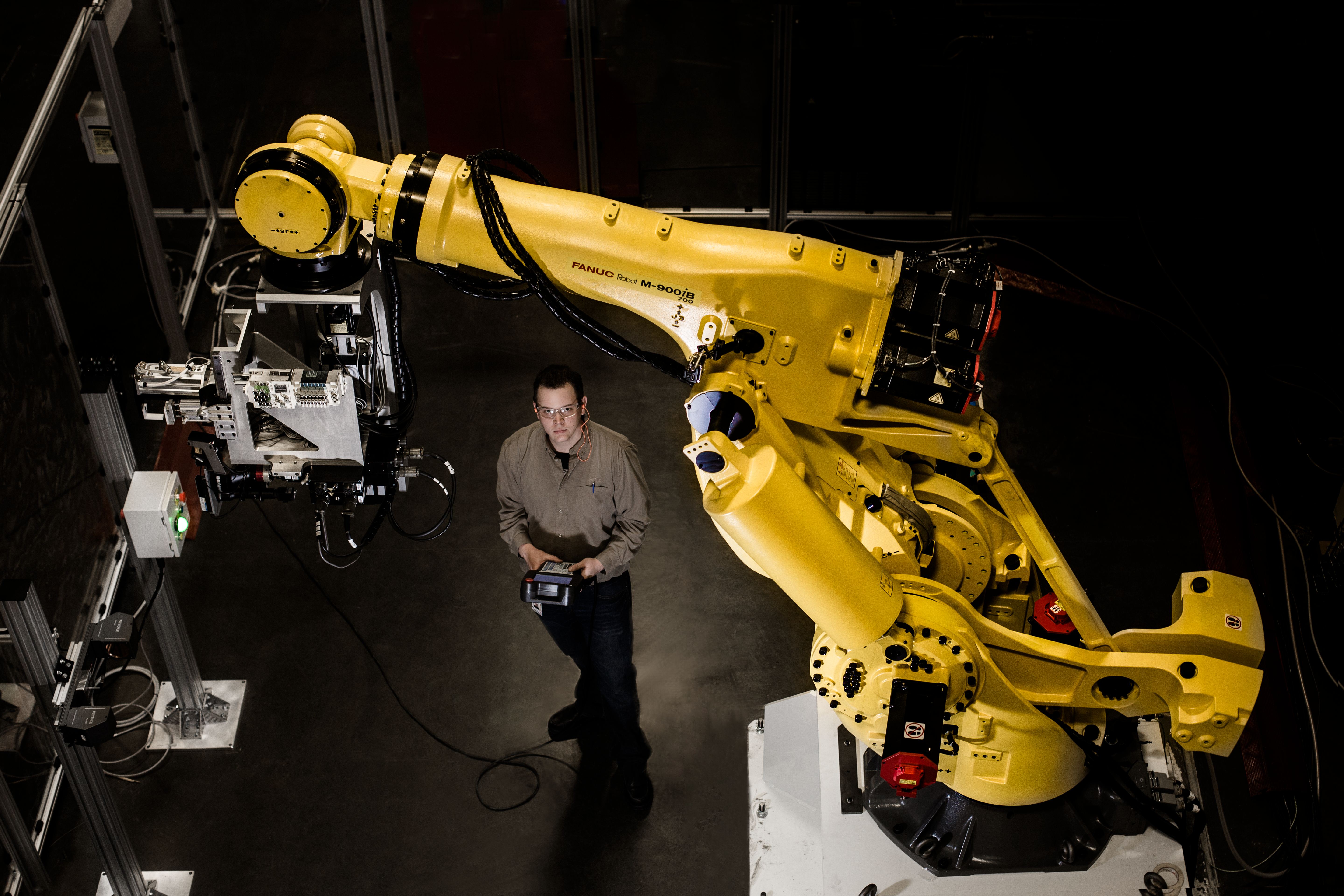
Precision Manufacturing Control
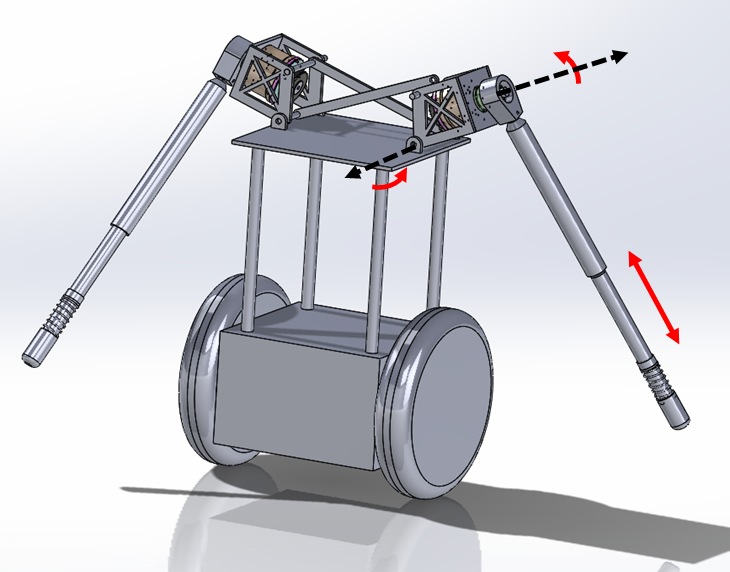
Third Robotic Leg (SRL)
High-Performance Haptics
Educational Autonomous Racecar
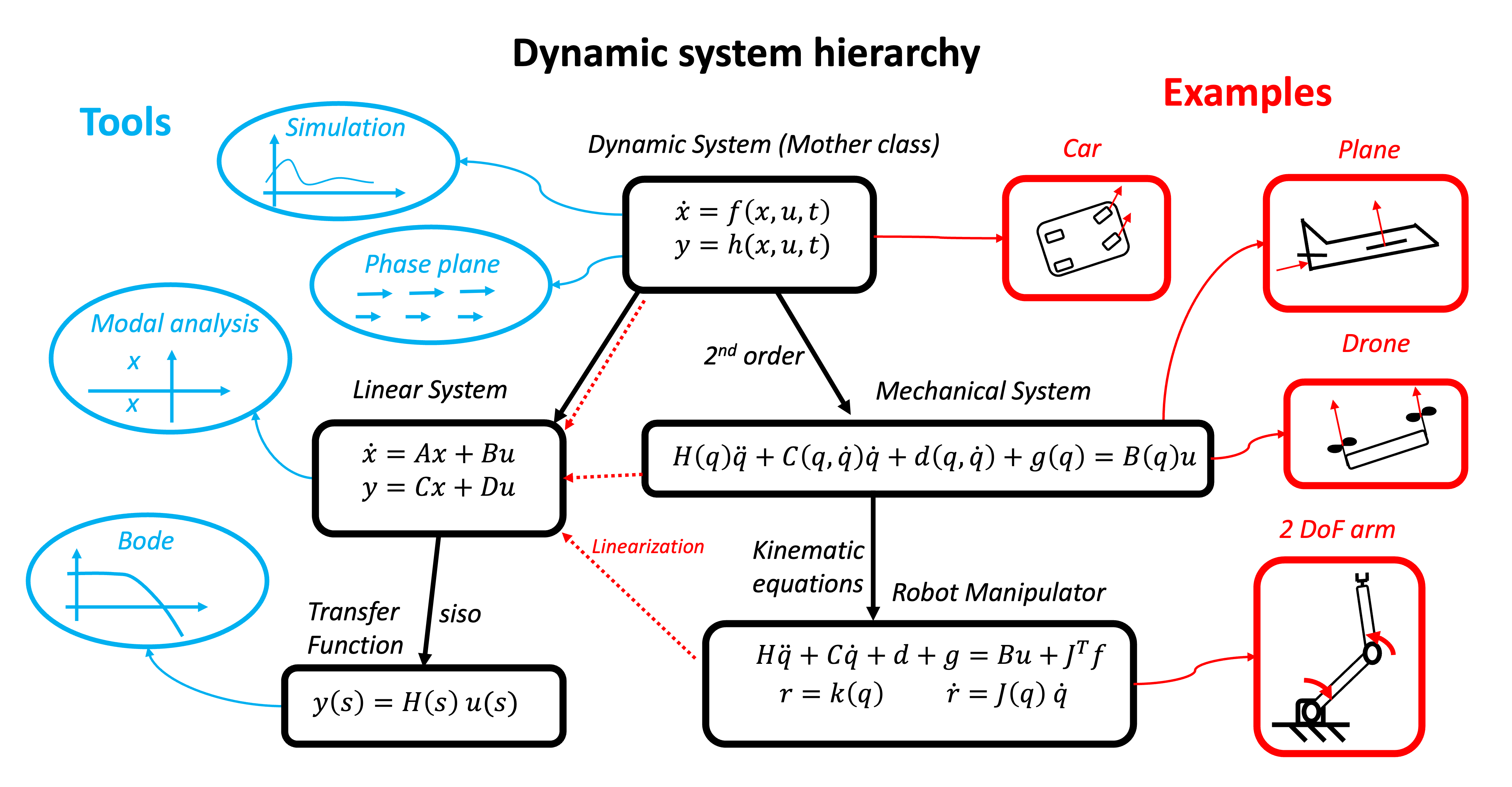
Pyro: Python Robotics Library
Force-Control Algorithms
Wearable Robotic Arms
Ankle Exoskeletons
Massachusetts Institute of Technology (2013-2017)
Climbing Manufacturing Robots
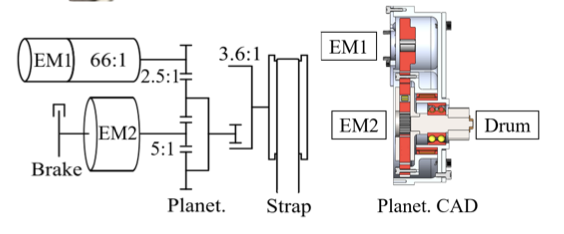
Variable Transmission Actuators for Robots
Optimal Policy Synthesis
Whole-Body Balancing Control
Sampling-based Path Planning
Université de Sherbrooke (2006-2012)
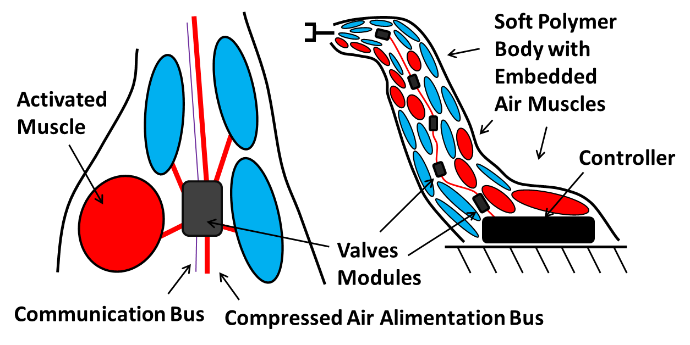
Control laws for Binary Robots
Soft Polymer Sensors
Industrial Robot Impedance Control
Robotized Transmission for Electric Vehicles
Fuel-Powered Fluidic Muscle
Algorithmic Programming