
Abstract
As part of my work in MIT’s d’Arbeloff laboratory, I developed optimal feedback laws for a two-speed actuator where both a continuous and a discrete variable must be selected.
Publications & Resources
📄 Conference (IEEE ICRA): A. Girard and H. H. Asada, "A practical optimal control approach for two-speed actuators," 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, pp. 4572–4577, 2016.
📄 arXiv preprint: A. Girard and H. H. Asada, "A practical optimal control approach for two-speed actuators," 2022.
Project Media
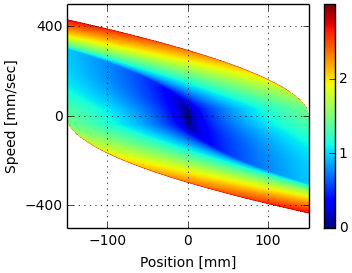
Cost-to-go
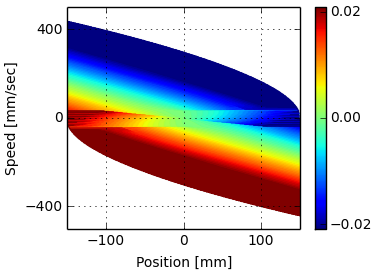
Torque policy
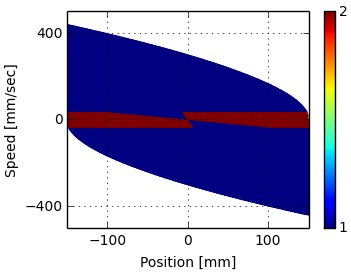
Mode policy
Cost-to-go