
Abstract
Control schemes leveraging IMU sensors to estimate the angle and velocity of the user legs were developed to interface with the action of the exoskeleton.
Project Media
Experiments
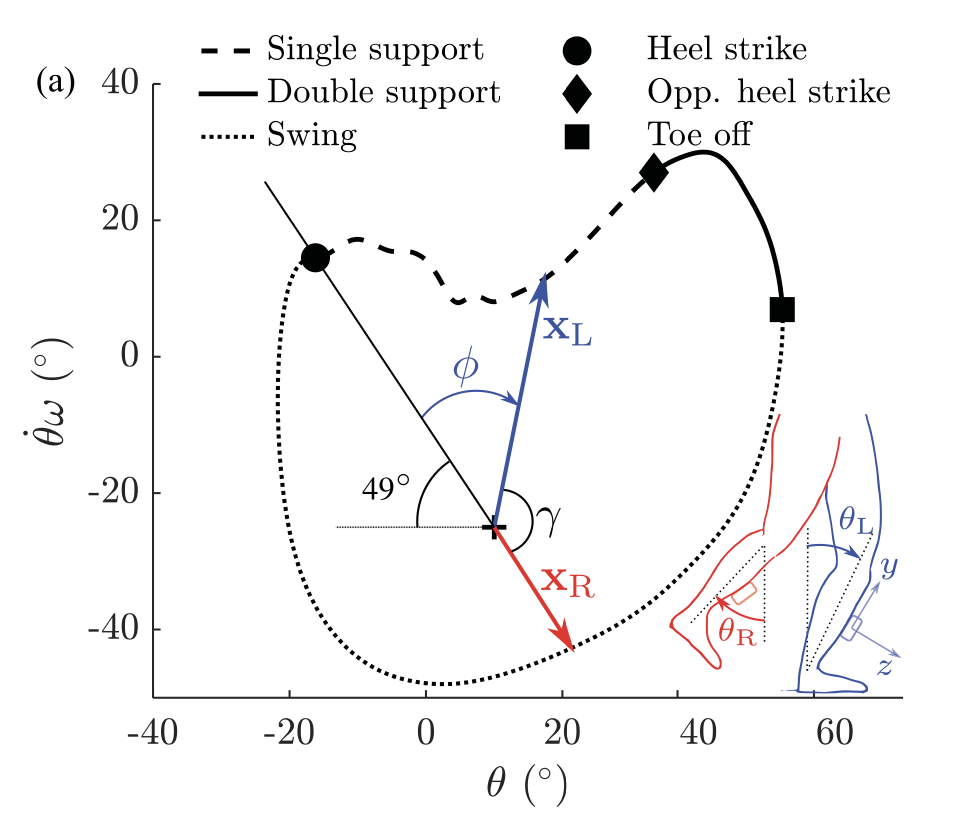
Phase plane used in the control laws