
Abstract
We have developed a flexible and open autonomous car platform for research and teaching based on a traxxas slash rc-car, the idea is derived from the MIT-racecar. The main difference is that the UdeS platform has a low-level microcontroller (arduino) for allowing to quickly prototype low-level control laws in addition to a high-level ROS-based computer for perception and motion planning algorithmsResources & Code
Project Media
Prototypes
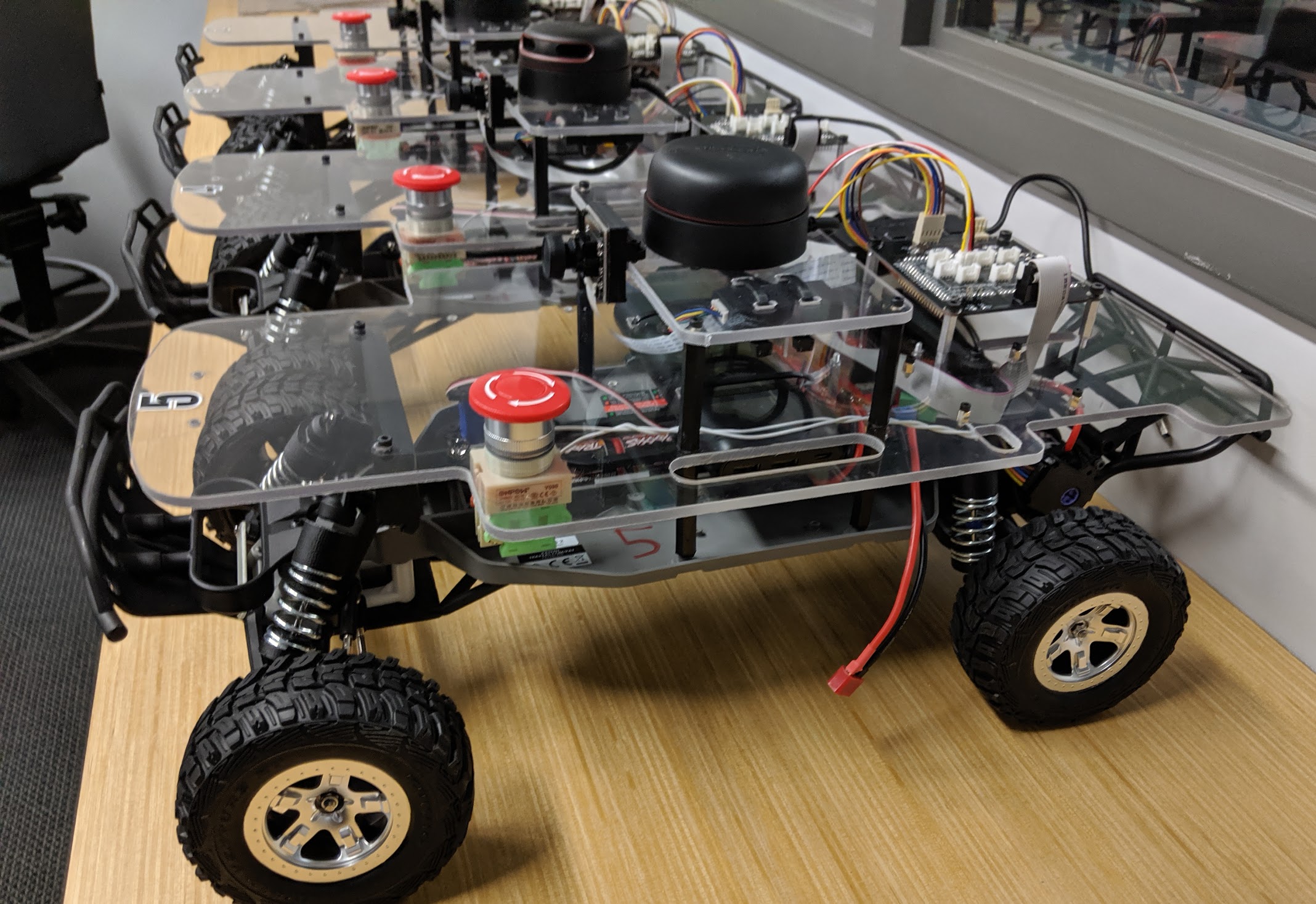
Hardware
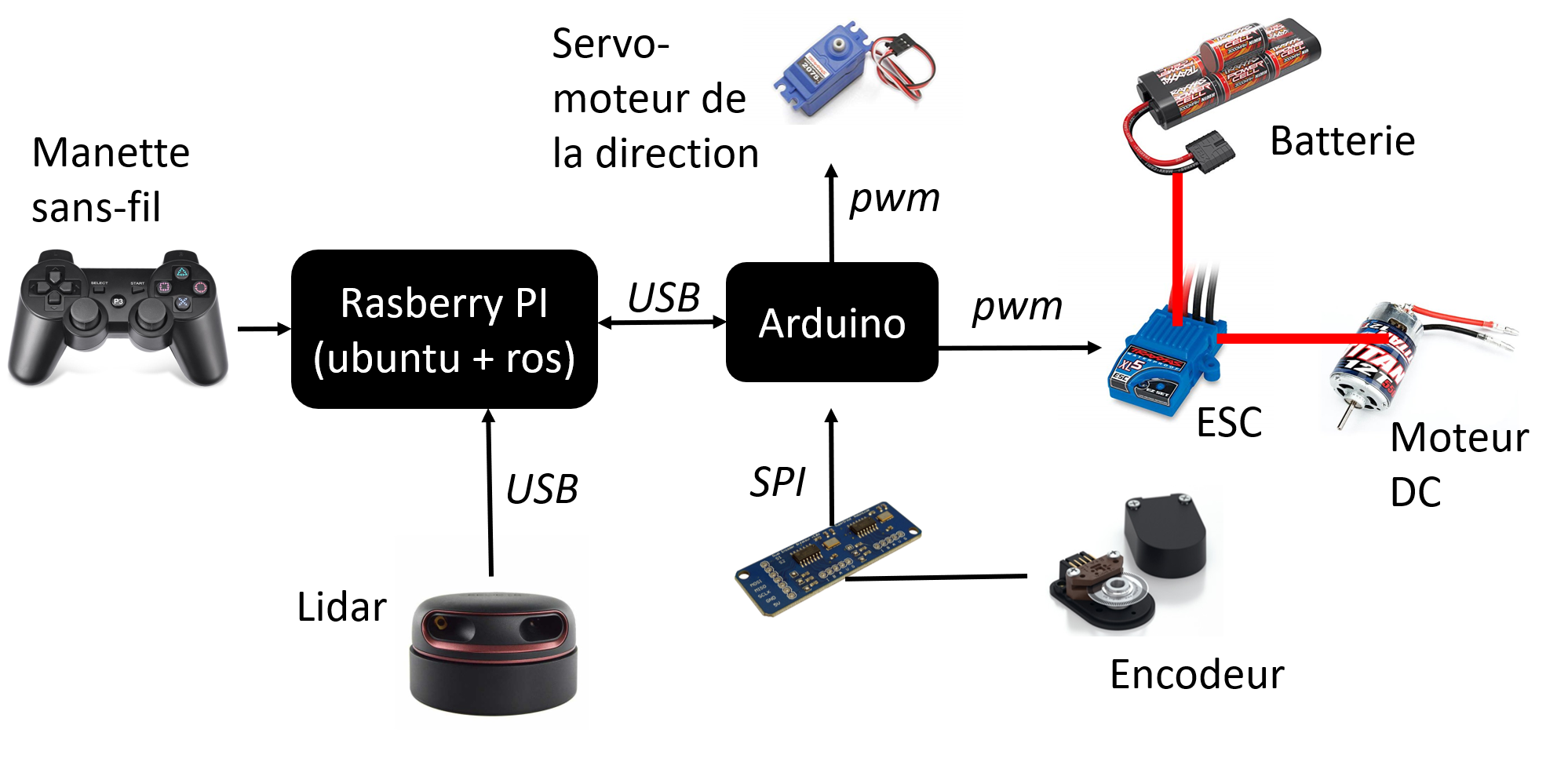
Architecture