
Abstract
Wearable and legged robot designers face significant challenges when choosing actuation. This research explores reconfigurable hydrostatics—a new design paradigm that integrates passive force mechanisms and sharing mechanisms directly in the fluid domain.
By leveraging hybrid modes and reconfiguring the hydraulic connections, we can meet multiple operating points with a lightweight system. Our research demonstrates that this concept offers significant mass and efficiency benefits, with proof-of-concept prototypes achieving up to 4.8x lower energy consumption for locomotion tasks compared to traditional fully actuated designs.
Publications & Resources
📄 Journal (Mechatronics): J. Denis, F. Laberge, J.-S. Plante and A. Girard, "Reconfigurable hydrostatics: Toward versatile and efficient load-bearing robotics," Mechatronics, vol. 113, p. 103420, 2025.
📄 arXiv preprint: J. Denis, F. Laberge, J.-S. Plante and A. Girard, "Reconfigurable hydrostatics: Toward versatile and efficient load-bearing robotics," 2024.
📄 arXiv preprint: J. Denis, A. Lecavalier, J. Plante and A. Girard, "Multimodal Hydrostatic Actuators for Wearable Robots: A Preliminary Assessment of Mass-Saving and Energy-Efficiency Opportunities," 2022.
📄 Conference (ICRA): J. Denis, A. Lecavalier, J.-S. Plante and A. Girard, "Multimodal Hydrostatic Actuators for Wearable Robots: A Preliminary Assessment of Mass-Saving and Energy-Efficiency Opportunities," IEEE International Conference on Robotics and Automation (ICRA), pp. 8112–8118, 2022.
📄 arXiv preprint: A. Lecavalier, J. Denis, J. Plante and A. Girard, "A Bimodal Hydrostatic Actuator for Robotic Legs with Compliant Fast Motion and High Lifting Force," 2022.
📄 Journal (MDPI Actuators): A. Lecavalier, J. Denis, J.-S. Plante and A. Girard, "A Bimodal Hydrostatic Actuator for Robotic Legs with Compliant Fast Motion and High Lifting Force," Actuators, vol. 12, no. 12, p. 452, 2023.
Project Media
Video Demo
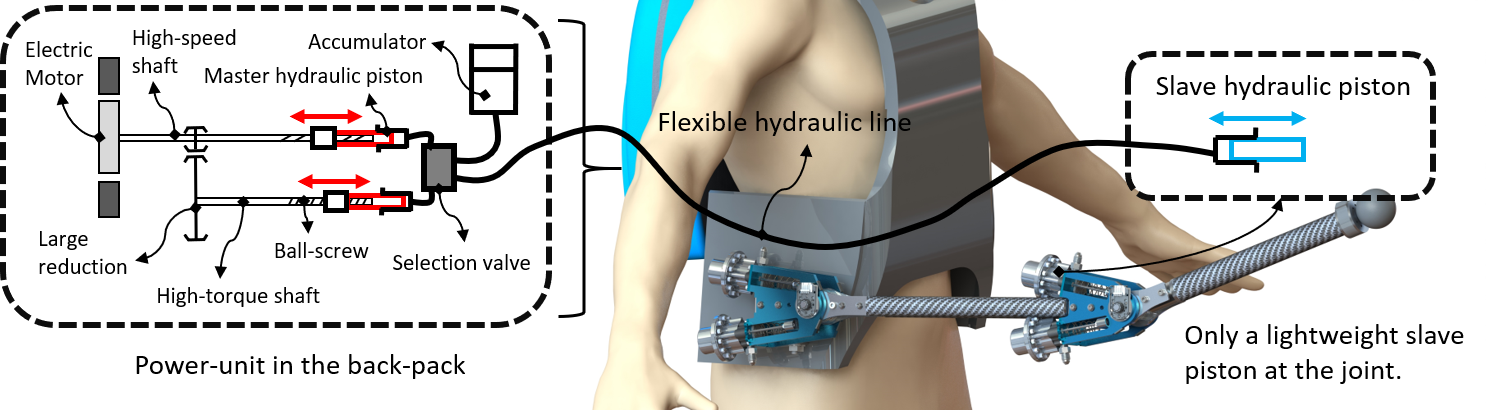
Concept for a wearable robot
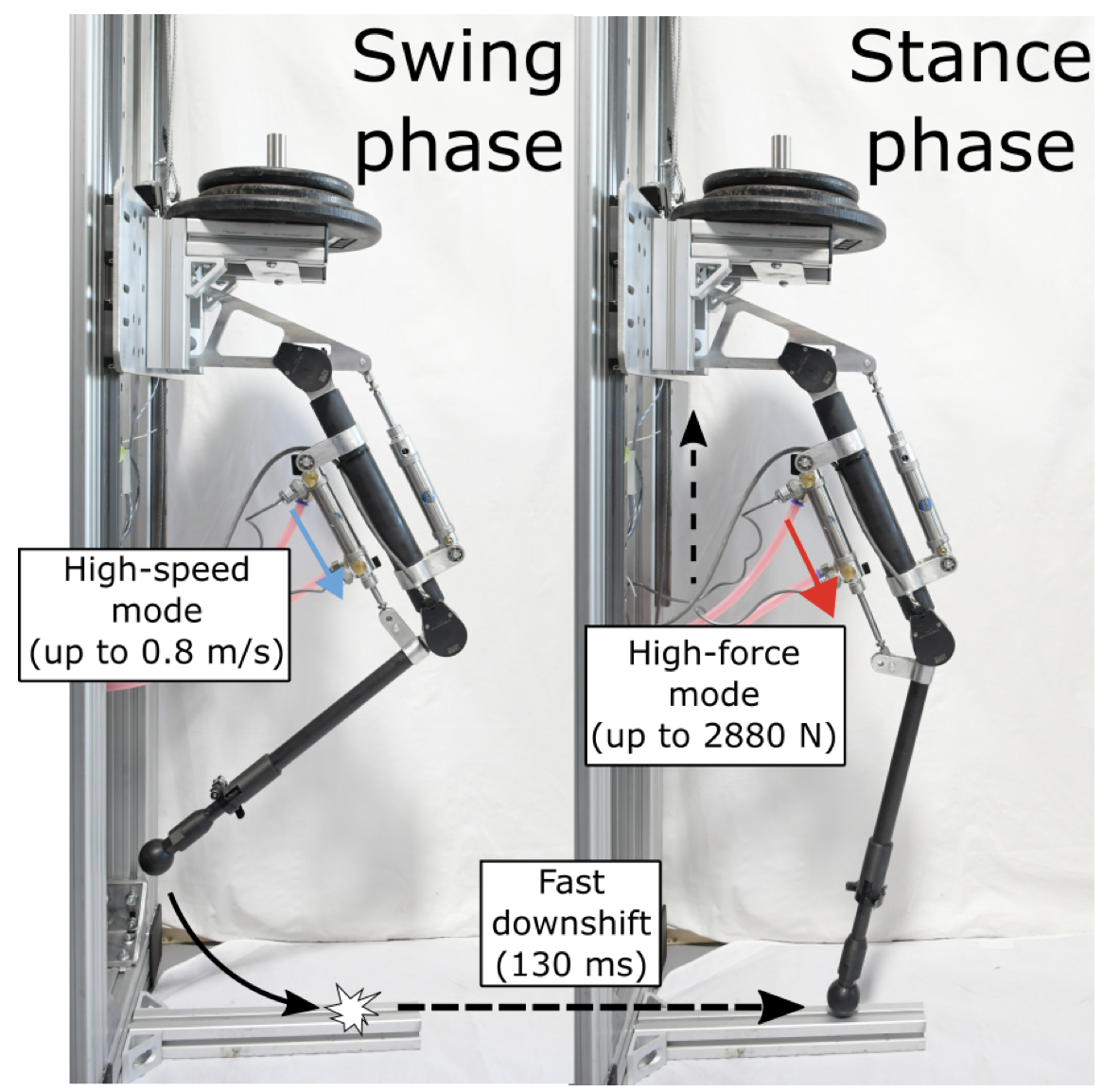
Prototype bimodal leg