
Abstract
Part of my work at MIT in d’Arbeloff Laboratory, I developed a 3-DoF robotic arm using custom actuators with variable gear-ratios. The aim is to develop a lightweight & high-payload architecture for mobile and portable robots.
Publications & Resources
📚 PhD thesis (MIT DSpace): A. Girard, "Fast and strong lightweight robots based on variable gear ratio actuators and control algorithms leveraging the natural dynamics," 2017.
📄 Journal (IEEE T-RO): A. Girard and H. H. Asada, "Leveraging natural load dynamics with variable gear-ratio actuators," IEEE Transactions on Robotics, vol. 33, no. 2, pp. 285–298, 2017.
📄 arXiv preprint: A. Girard and H. H. Asada, "Leveraging Natural Load Dynamics with Variable Gear-ratio Actuators," 2024.
📄 arXiv preprint: A. Girard and H. H. Asada, "A Fast Gear-Shifting Actuator for Robotic Tasks with Contacts," 2022.
📄 arXiv preprint: A. Girard and H. H. Asada, "A two-speed actuator for robotics with fast seamless gear shifting," 2024.
📄 Conference (IEEE IROS): A. Girard and H. H. Asada, "A two-speed actuator for robotics with fast seamless gear shifting," 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 410–417, 2015.
💻 Code (GitHub): DSDM_Robotics_ROS
Project Media
Prototype actuator
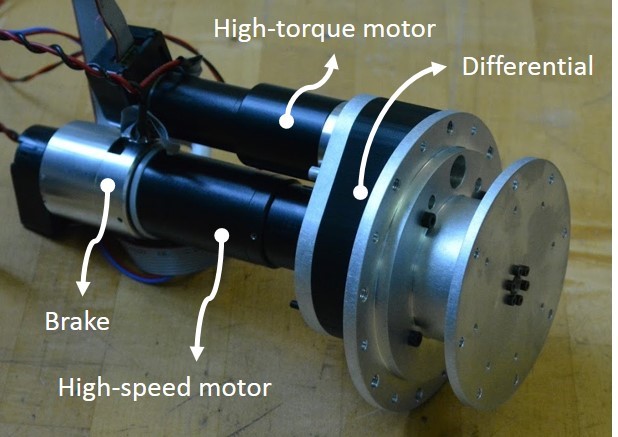
Prototype actuator

3 DoF arm
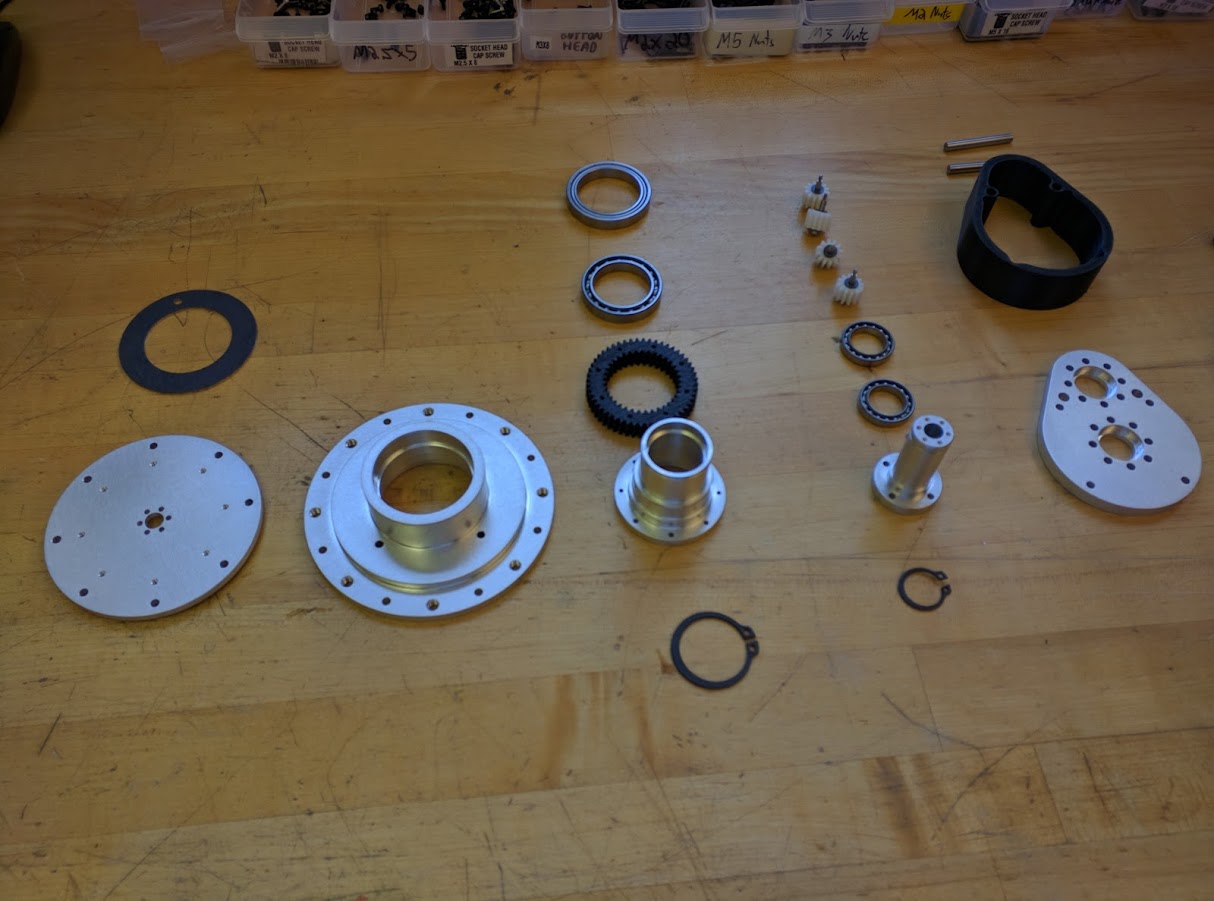
Actuator custom parts
Prototype actuator
Prototype actuator
Prototype actuator