Abstract
As part of my work in MIT’s d’Arbeloff laboratory, I developed motion planning algorithm to generate low torque trajectory for a custom 3 DoF robotic manipulator.
Project Media
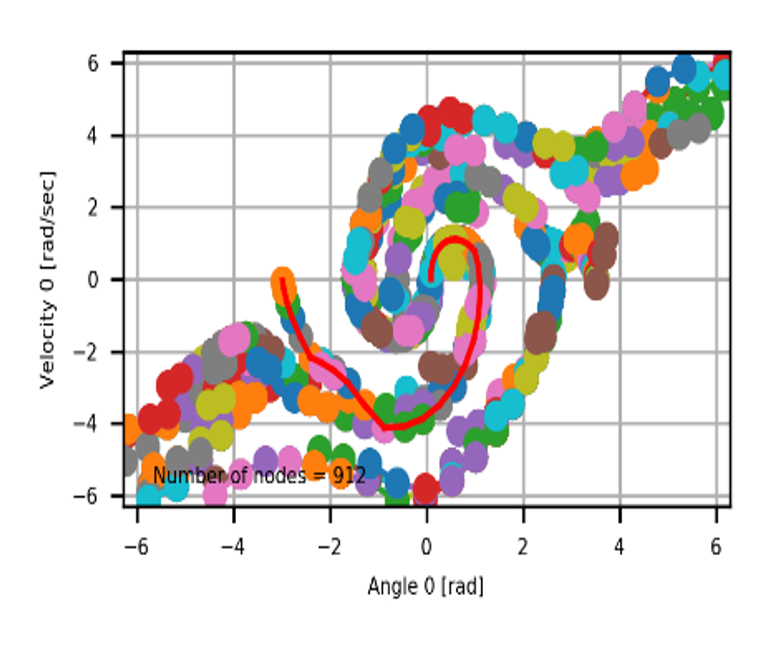
RRT Algorithm

As part of my work in MIT’s d’Arbeloff laboratory, I developed motion planning algorithm to generate low torque trajectory for a custom 3 DoF robotic manipulator.