
Abstract
Controlling the interaction force with the environment is critical for many robotics application, in particular when a human user interact with a robot. This project developped and evaluated controllers for high-precision control of the output force, for system using MR-hydrostatic actuators built in the lab. Multiple control scheme were developped, evaluated experimentally and compared.
Publications & Resources
📄 Journal (IEEE/ASME T-Mech): J. Bourque, J. Denis, C. Veronneau, J. S. Plante and A. Girard, "Low-level force-control of MR-hydrostatic actuators," IEEE/ASME Transactions on Mechatronics, vol. 26, no. 1, pp. 456–466, 2021.
📄 arXiv preprint: J. Denis, J. Plante and A. Girard, "Low-Level Force-Control of MR-Hydrostatic Actuators," 2024.
Project Media
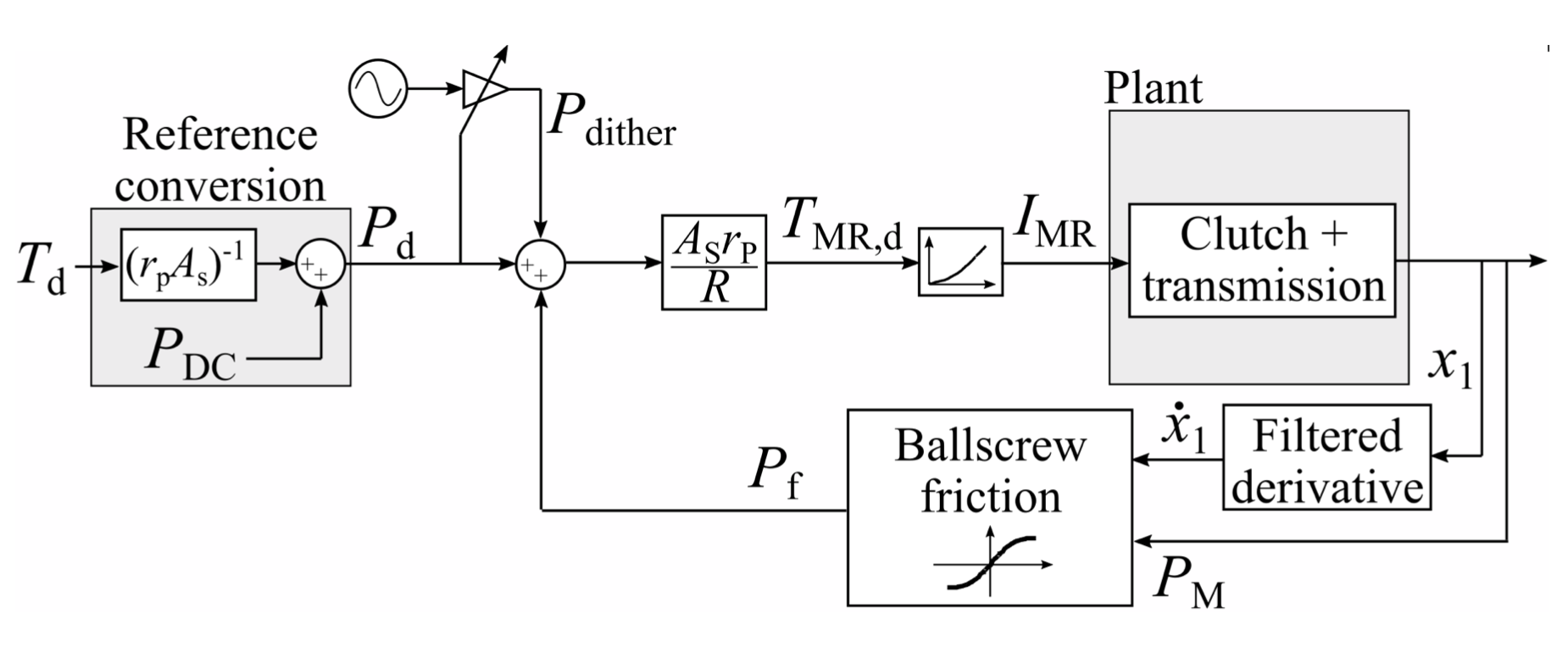
Open-loop controller
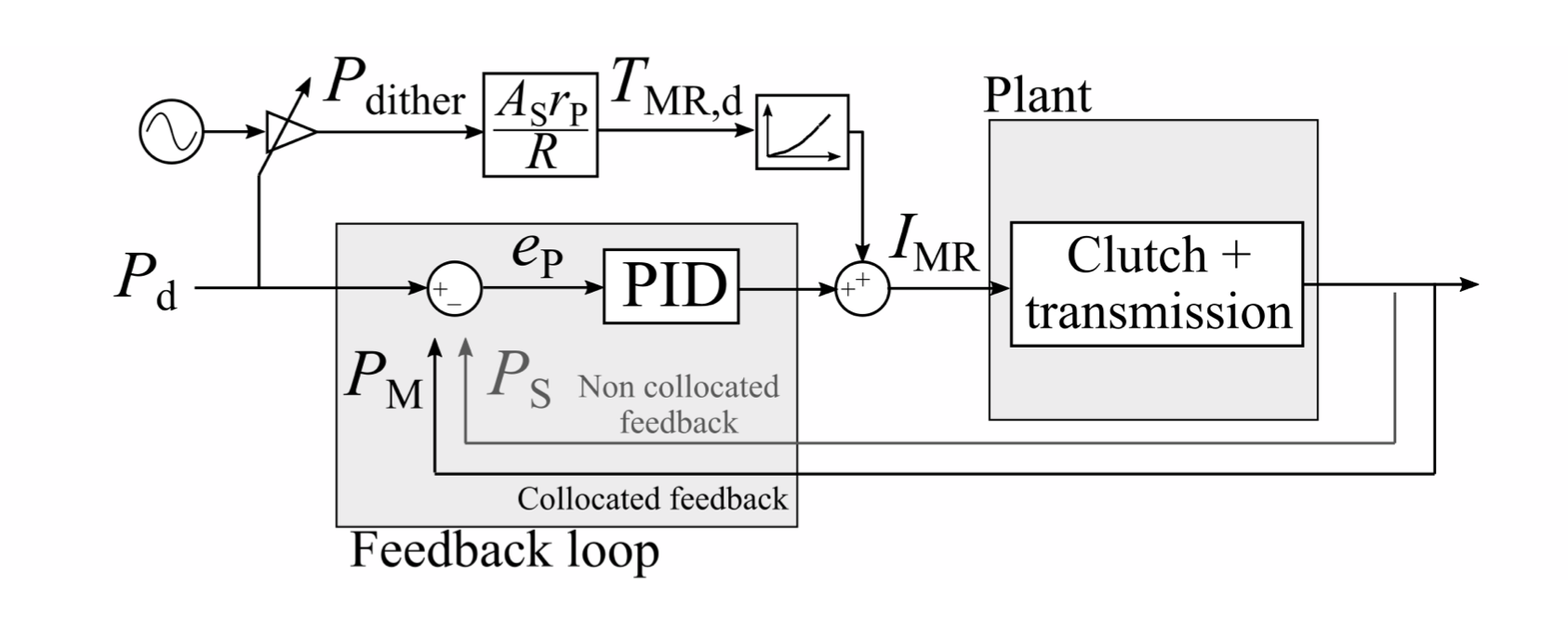
PID controller
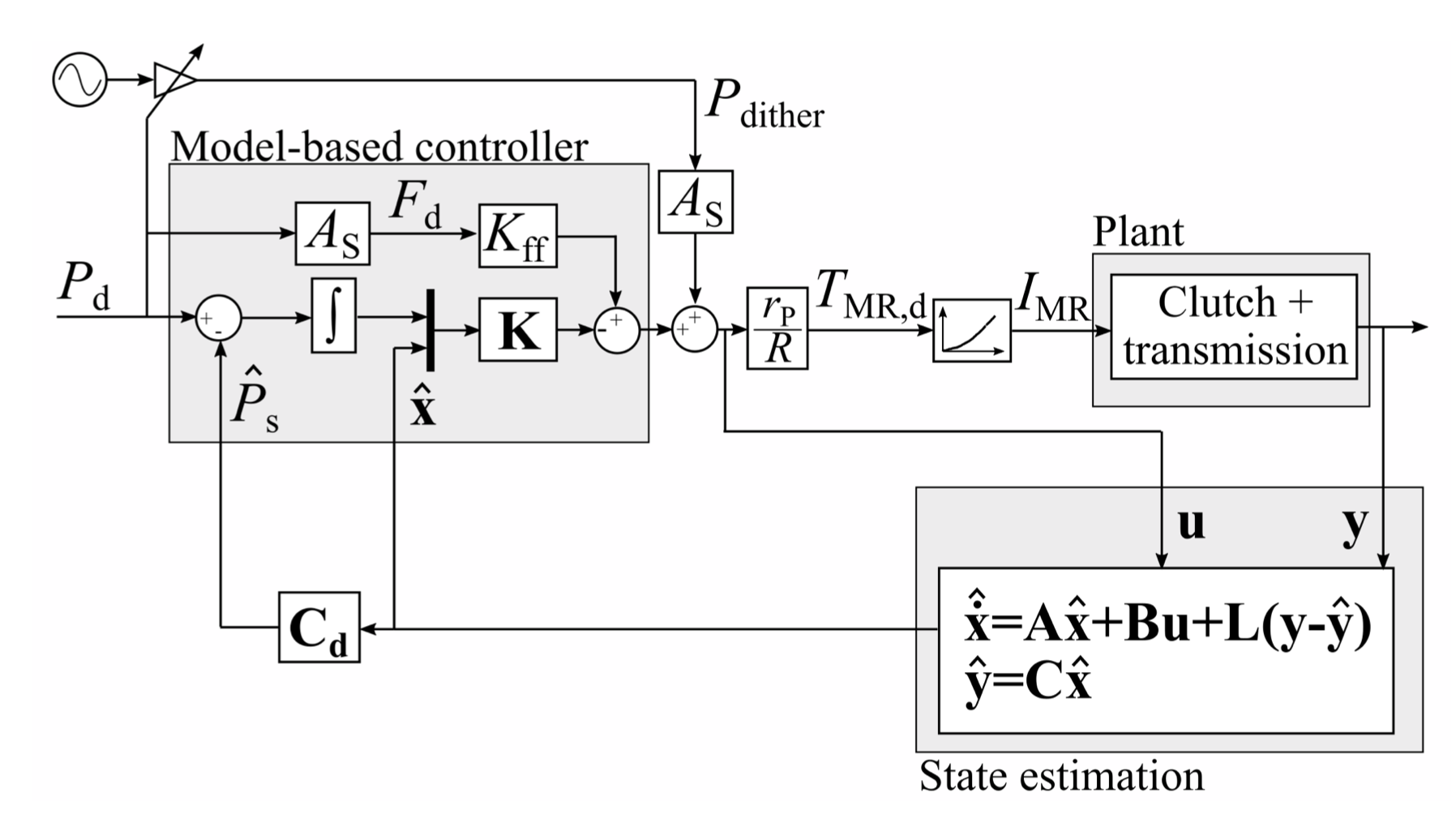
State-feedback controller