
Abstract
As part of my work at MIT, I designed a control scheme for Segway-type balancing robots, leveraging arm dynamic effects, to simultaneously stabilize and eliminate the non-minimal phase behavior.
Project Media
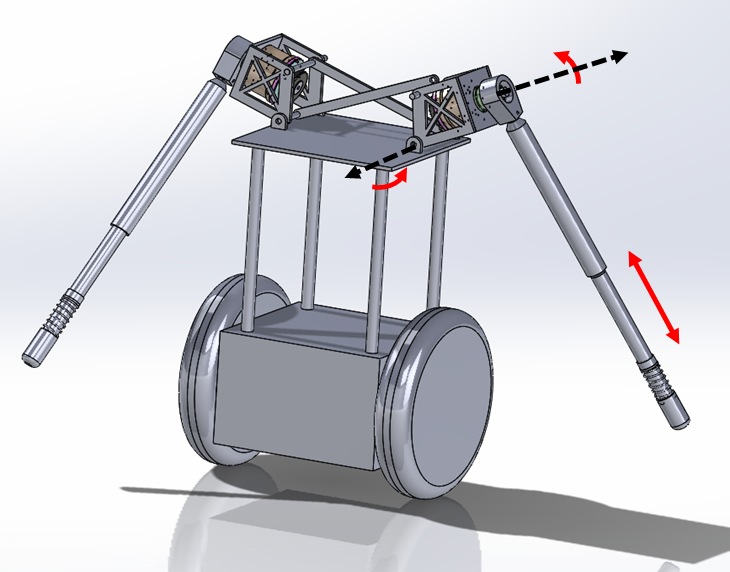
Concept

Prototype
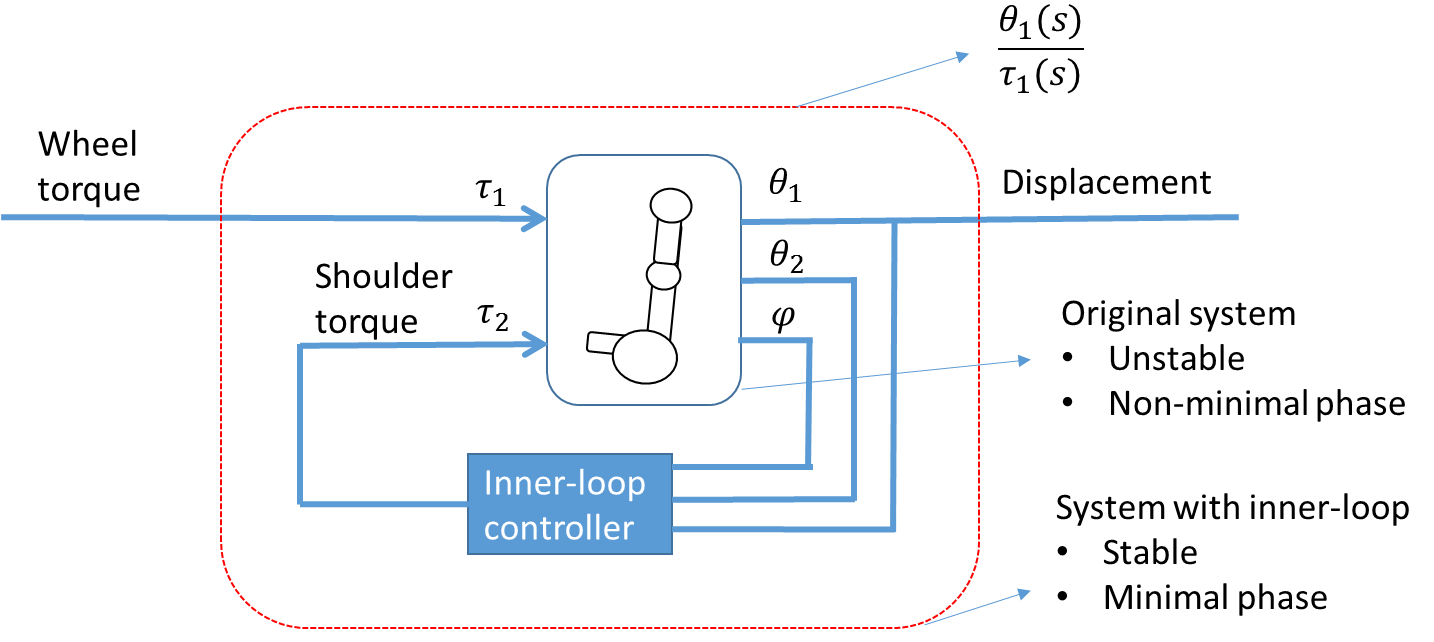
Control scheme