
Abstract
During a short stay at the Bioengineering Institute of the University of Auckland, I designed, manufactured and characterized a proof of concept two-DOF sensing device. The aim was to develop a sensor technology that can comply with soft-robots.
Publications & Resources
📄 Journal (IEEE/ASME T-Mech): A. Girard, J. P. L. Bigué, B. M. O'Brien, T. A. Gisby, I. A. Anderson and J. Plante, "Soft Two-degree-of-freedom Dielectric Elastomer Position Sensor Exhibiting Linear Behavior," IEEE/ASME Transactions on Mechatronics, vol. 20, no. 1, pp. 105–114, 2015.
📄 arXiv preprint: A. Girard, J. P. L. Bigué, B. M. O'Brien, T. A. Gisby, I. A. Anderson and J. Plante, "Soft Two-degree-of-freedom Dielectric Elastomer Position Sensor Exhibiting Linear Behavior," 2024.
Project Media
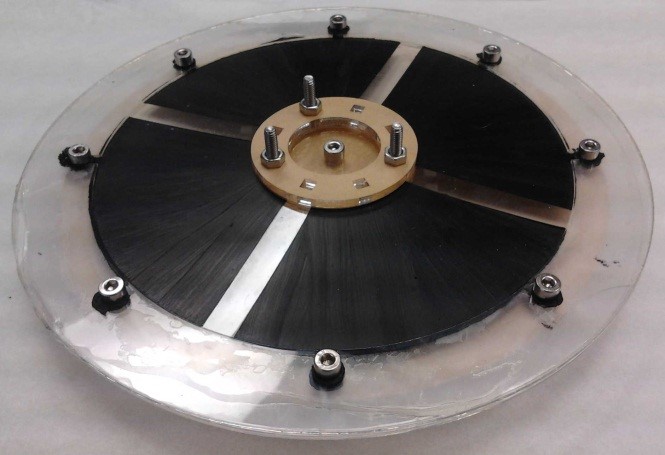
Prototype
Prototype
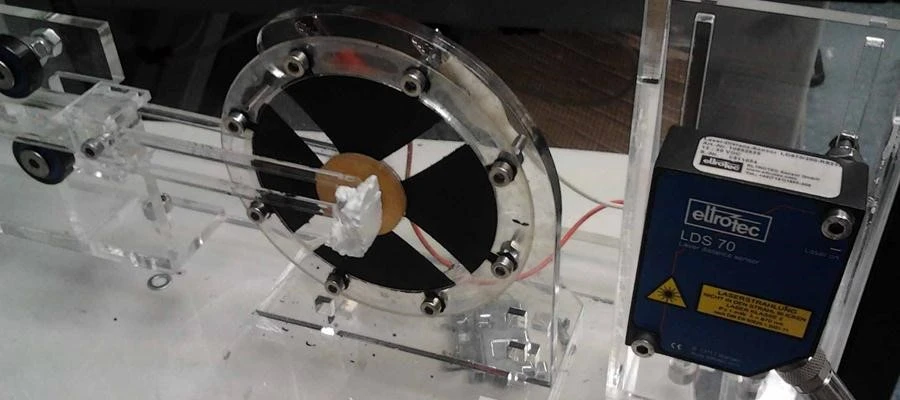
Prototype

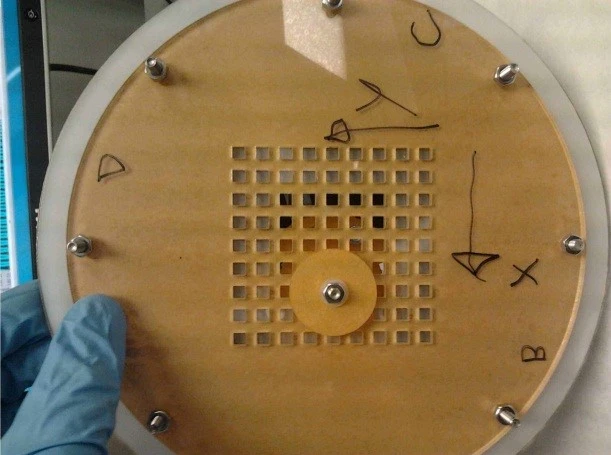
Prototype