
Abstract
We have developed a lightweight 2 DoF robotic arm interfaced with ROS for teaching robot arm control design and a simple software wrapper that implements many popular control schemes (computed torque, joint-space impedance, task-space impedance, etc.).
Publications & Resources
Project Media
Prototype
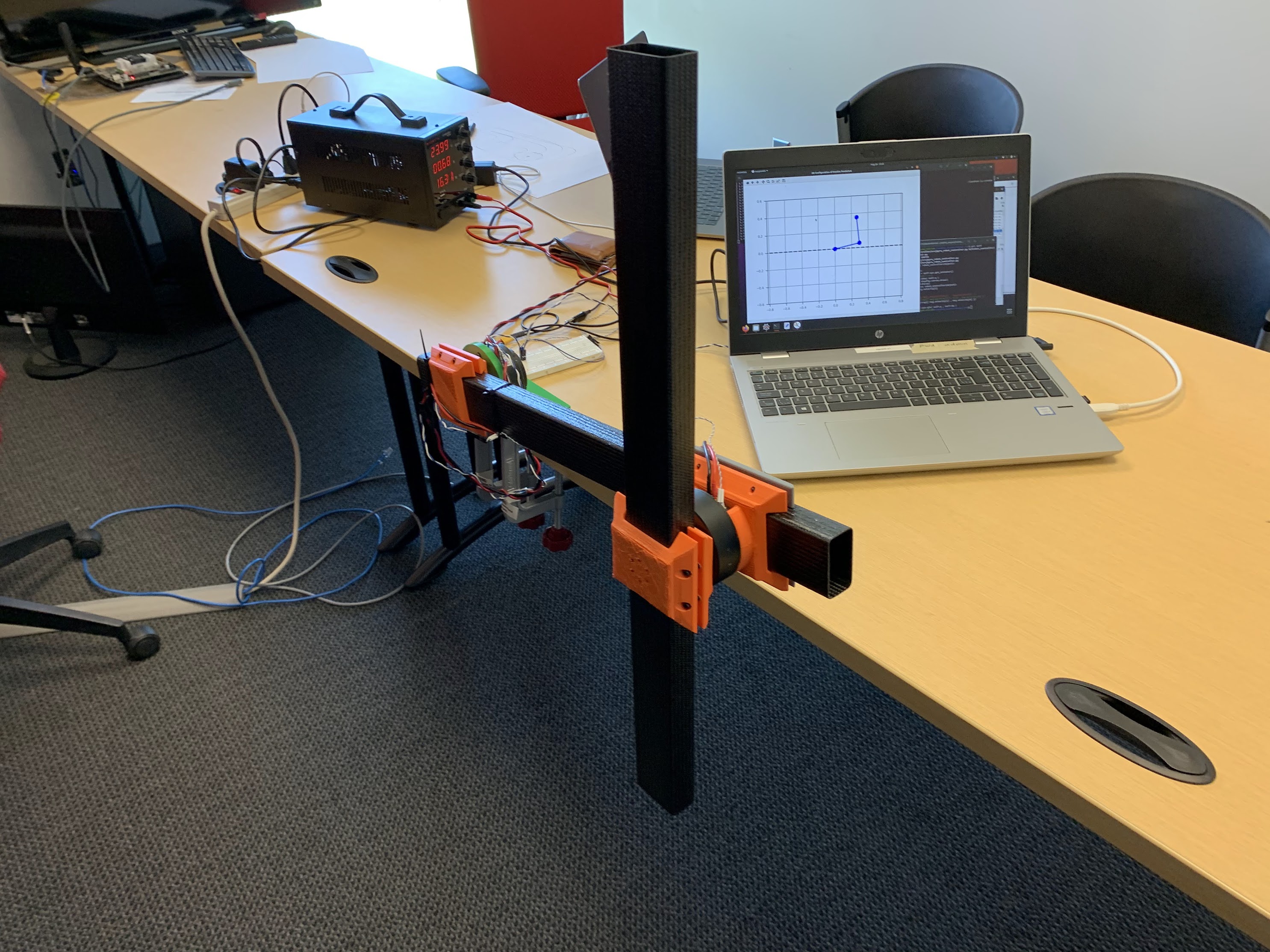
Prototype

Prototype
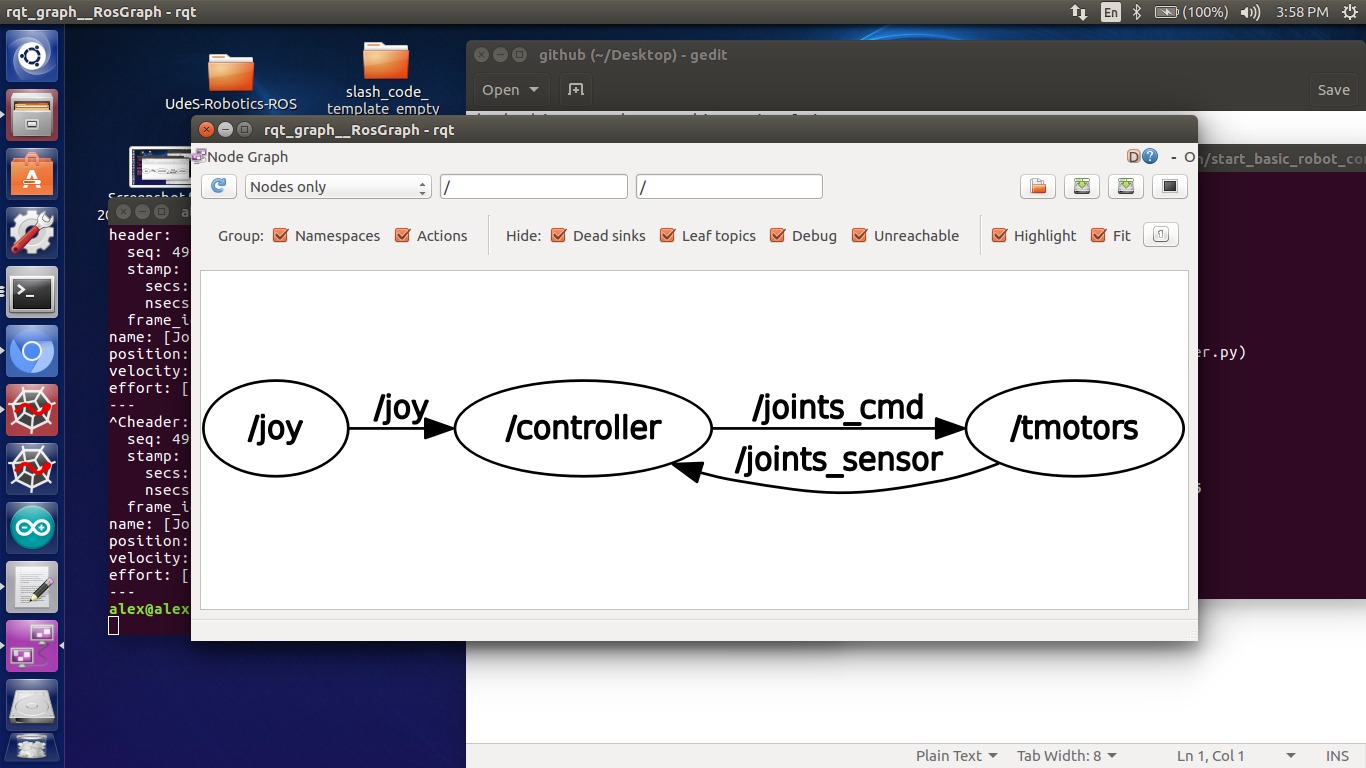
ROS architecture