Alex Robotics
Learning material
Colab Tutorials
Optimal control:
-

-
LQR vs. Dynamic Programming
This page shows a quick demo of how DP (dynamic programming) can be used for finding global optimal control policy of non-linear systems.
-
Trajectory optimization
This page shows and exemple of planning an optimal trajectory for a cart-pole swing-up with the direct-collocation method.
-
-
-
-
-
Robot arm control:
Classical controls:
-
-
Phase Plane Analysis
This page is an interactive tutorial on phase plane analysis for dynamical systems.
Machine Learning:
-
Diffusion in 2D
This page is an interactive tutorial on the base concept of diffusion.
-
Diffusion policy
This page is an interactive tutorial on the base concept of diffusion policies.
Dynamic:
Reinforcement learning:
-
-
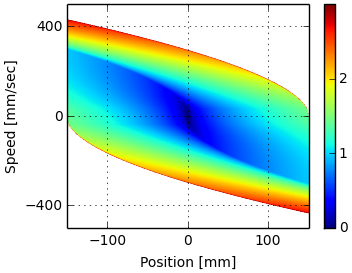
Cost-to-go approximation
A colab page demonstrating various function approximation for the optimal cost-to-go of a pendulum swing-up problem
Pyro toolbox:
UdeS Classes
- Robot kinematic : GRO203
- Linear algebra : GRO211
- Controls : GRO501
- Robot differential kinematic and quasi-static controls: GRO640
- Robotic : Modeling and Controls - GMC714
- Optimal control and reinforcement learning: GRO860